
Page 188 - Autonomous Mobile Robots
P. 188
172 Autonomous Mobile Robots
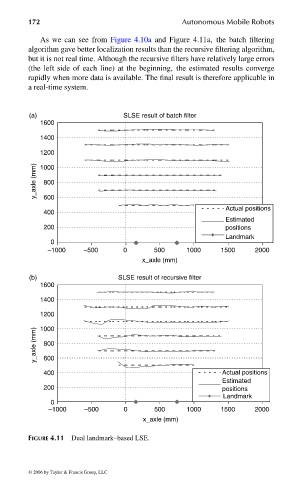
As we can see from Figure 4.10a and Figure 4.11a, the batch filtering
algorithm gave better localization results than the recursive filtering algorithm,
but it is not real time. Although the recursive filters have relatively large errors
(the left side of each line) at the beginning, the estimated results converge
rapidly when more data is available. The final result is therefore applicable in
a real-time system.
(a) SLSE result of batch filter
1600
1400
1200
y_axle (mm) 1000
800
600
Actual positions
400
Estimated
200 positions
Landmark
0
– 1000 – 500 0 500 1000 1500 2000
x_axle (mm)
(b) SLSE result of recursive filter
1600
1400
1200
1000
y_axle (mm) 800
600
400 Actual positions
Estimated
200 positions
Landmark
0
– 1000 – 500 0 500 1000 1500 2000
x_axle (mm)
FIGURE 4.11 Dual landmark–based LSE.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c004” — 2006/3/31 — 16:42 — page 172 — #24