
Page 32 - Autonomous Mobile Robots
P. 32
16
3D target tracking
Terrain analysis
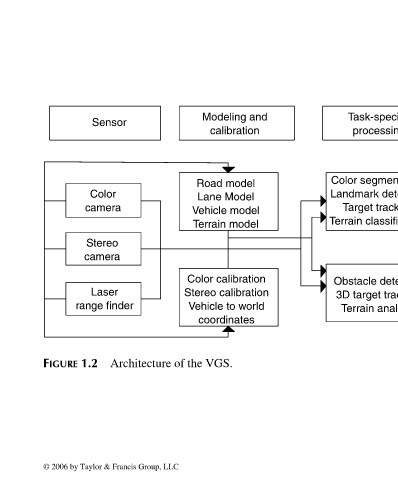
Task-specific World mapping Sensor fusion processing Color segmentation Landmark detection Target tracking Obstacle map Terrain classification Obstacle map fusion Elevation map Terrain cluster fusion Road map Road map and Lead vehicle orientation obstacle
Modeling and calibration Road model Lane Model Vehicle model Terrain model Color calibration Stereo calibration Vehicle to world coordinates VGS.
of the
Architecture
Sensor Color camera Stereo camera Laser range finder 1.2 © 2006 by Taylor & Francis Group, LLC
FIGURE
FRANKL: “dk6033_c001” — 2006/3/31 — 16:42 — page 16 — #16