
Page 289 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 289
266 BIOMECHANICS OF THE HUMAN BODY
even though these may have inaccessible origins that are anatomical sites within the body. In
practice, sensors are commonly oriented to record the component accelerations defined by the
basicentric coordinate systems shown in Fig. 11.2 (ISO 2631–1, 1997; ISO 5349–1, 2001), which
have origins at the interface between the body and the vibrating surface. The location of accelerometers
to record the handle vibration of specific power tools is described in an international standard
(ISO 5349-2, 2001).
Errors in Shock and Impact Measurement. Care must be taken when accelerometers employing
piezoelectric elements are used to measure large-magnitude shocks and impacts, as they are subject
to internal crystalline changes that result in dc shifts in the output voltage. Results containing such
shifts should be considered erroneous. This limitation of piezoelectric transducers may be overcome
by mounting the sensor on a mechanical low-pass filter (see “Simple Lumped Models” in Sec. 11.3.1),
which is, in turn, attached to the structure of interest. Such filters possess a resilient element that
serves to reduce the transmission of vibration at high frequencies (Mansfield, 2005). The filter
cutoff frequency is selected to be above the maximum vibration frequency of interest but below the
internal mechanical resonance frequency of the accelerometer.
Data Recording. The signal produced by vibration, shock, and impact sensors is first conditioned
to remove bias voltages or other signals required for the device to function, and then amplified and
buffered for output to a data recording system. The output may be stored on high-quality magnetic
tape (e.g., a DAT recorder), or by a digital data acquisition system. The latter should possess
low-pass, antialiasing filters (with cutoff frequency typically one-half the sampling frequency), and
an analog-to-digital (A/D) converter with sufficient dynamic range (commonly 16 bits). The data
acquisition system should be capable of recording time histories at sampling frequencies of at least
2500 Hz for hand-transmitted vibration, or 160 Hz for whole-body vibration, per vibration component
and measurement site (e.g., palm and wrist, or seat surface and seat back).
11.2.2 Small-Amplitude Response of the Human Body
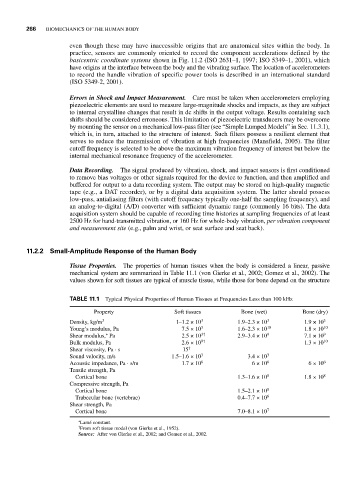
Tissue Properties. The properties of human tissues when the body is considered a linear, passive
mechanical system are summarized in Table 11.1 (von Gierke et al., 2002; Gomez et al., 2002). The
values shown for soft tissues are typical of muscle tissue, while those for bone depend on the structure
TABLE 11.1 Typical Physical Properties of Human Tissues at Frequencies Less than 100 kHz
Property Soft tissues Bone (wet) Bone (dry)
Density, kg/m 3 1–1.2 × 10 3 1.9–2.3 × 10 3 1.9 × 10 3
Young’s modulus, Pa 7.5 × 10 3 1.6–2.3 × 10 10 1.8 × 10 10
∗
Shear modulus, Pa 2.5 × 10 3† 2.9–3.4 × 10 9 7.1 × 10 9
Bulk modulus, Pa 2.6 × 10 9† 1.3 × 10 10
Shear viscosity, Pa . s 15 †
Sound velocity, m/s 1.5–1.6 × 10 3 3.4 × 10 3
Acoustic impedance, Pa . s/m 1.7 × 10 6 6 × 10 6 6 × 10 6
Tensile strength, Pa
Cortical bone 1.3–1.6 × 10 8 1.8 × 10 8
Compressive strength, Pa
Cortical bone 1.5–2.1 × 10 8
Trabecular bone (vertebrae) 0.4–7.7 × 10 6
Shear strength, Pa
Cortical bone 7.0–8.1 × 10 7
∗ Lamé constant.
† From soft tissue model (von Gierke et al., 1952).
Source: After von Gierke et al., 2002; and Gomez et al., 2002.