
Page 431 - Biomimetics : Biologically Inspired Technologies
P. 431
Bar-Cohen : Biomimetics: Biologically Inspired Technologies DK3163_c016 Final Proof page 417 21.9.2005 11:49pm
Biomimetic and Biologically Inspired Control 417
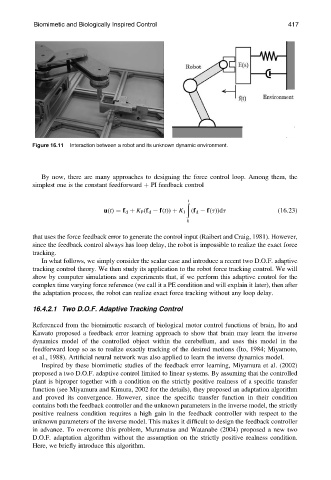
Figure 16.11 Interaction between a robot and its unknown dynamic environment.
By now, there are many approaches to designing the force control loop. Among them, the
simplest one is the constant feedforward þ PI feedback control
ð t
u(t) ¼ f d þ K P (f d f(t)) þ K I (f d f(t))dt (16:23)
0
that uses the force feedback error to generate the control input (Raibert and Craig, 1981). However,
since the feedback control always has loop delay, the robot is impossible to realize the exact force
tracking.
In what follows, we simply consider the scalar case and introduce a recent two D.O.F. adaptive
tracking control theory. We then study its application to the robot force tracking control. We will
show by computer simulations and experiments that, if we perform this adaptive control for the
complex time varying force reference (we call it a PE condition and will explain it later), then after
the adaptation process, the robot can realize exact force tracking without any loop delay.
16.4.2.1 Two D.O.F. Adaptive Tracking Control
Referenced from the biomimetic research of biological motor control functions of brain, Ito and
Kawato proposed a feedback error learning approach to show that brain may learn the inverse
dynamics model of the controlled object within the cerebellum, and uses this model in the
feedforward loop so as to realize exactly tracking of the desired motions (Ito, 1984; Miyamoto,
et al., 1988). Artificial neural network was also applied to learn the inverse dynamics model.
Inspired by these biomimetic studies of the feedback error learning, Miyamura et al. (2002)
proposed a two D.O.F. adaptive control limited to linear systems. By assuming that the controlled
plant is biproper together with a condition on the strictly positive realness of a specific transfer
function (see Miyamura and Kimura, 2002 for the details), they proposed an adaptation algorithm
and proved its convergence. However, since the specific transfer function in their condition
contains both the feedback controller and the unknown parameters in the inverse model, the strictly
positive realness condition requires a high gain in the feedback controller with respect to the
unknown parameters of the inverse model. This makes it difficult to design the feedback controller
in advance. To overcome this problem, Muramatsu and Watanabe (2004) proposed a new two
D.O.F. adaptation algorithm without the assumption on the strictly positive realness condition.
Here, we briefly introduce this algorithm.