
Page 428 - Biomimetics : Biologically Inspired Technologies
P. 428
Bar-Cohen : Biomimetics: Biologically Inspired Technologies DK3163_c016 Final Proof page 414 21.9.2005 11:49pm
414 Biomimetics: Biologically Inspired Technologies
(c) (d)
0 f
EMG6 400 6
EMG5 0 f 5
400
IEMG EMG4 Muscle force (N) 400 0 f 4
EMG3 400 0 f 3
EMG2
0 f 2
400
EMG1
0.2 0.4 0.6 0.8 1 1.2 1.4 0 0.25 0.5 0.75 1 1.25 1.5 f 1
Time (s) Time (s)
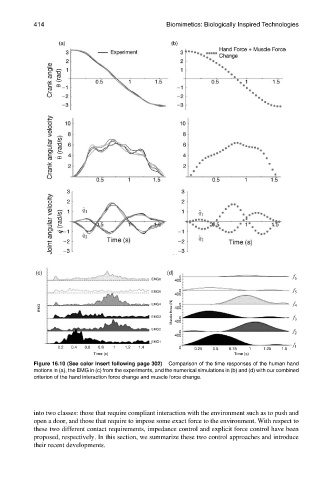
Figure 16.10 (See color insert following page 302) Comparison of the time responses of the human hand
motions in (a), the EMG in (c) from the experiments, and the numerical simulations in (b) and (d) with our combined
criterion of the hand interaction force change and muscle force change.
into two classes: those that require compliant interaction with the environment such as to push and
open a door, and those that require to impose some exact force to the environment. With respect to
these two different contact requirements, impedance control and explicit force control have been
proposed, respectively. In this section, we summarize these two control approaches and introduce
their recent developments.