
Page 16 - CNC Robotics
P. 16
CNC Robotics
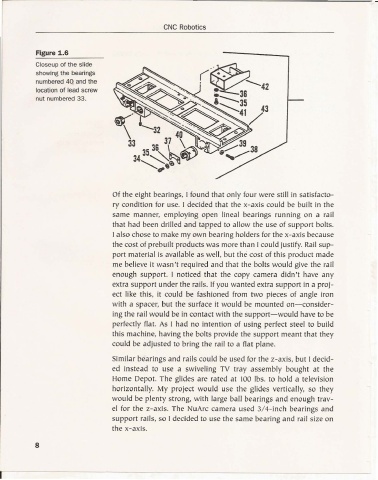
Figure 1.6
Closeup of the slide
showing the bearings
numbered 40 and the
location of lead screw
nut numbered 33 .
Of the eight bearings, I found that only four were still in satisfacto-
ry condition for use. I decided that the x-axis could be built in the
same manner, employing open linea l bearings running on a rail
that had been drilled and tapped to allow the use of support bolts.
I also chose to make my own bearing holders for the x-ax is because
the cost of preb uilt products was more than Icould justify. Rail sup-
port material is ava ilable as well, but the cost of this product made
me believe it wasn't required and that the bolts wo uld give the rail
enough su pport. I noti ced that the copy camera didn't have any
extra support under the rails. If you wanted extra support in a pro j-
ect like this, it co uld be fashioned from two pieces of angle iron
with a spacer, but the su rface it would be mounted on-consider-
ing the rail would be in con tact with the support-would have to be
perfectly flat. As I had no intention of using perfect steel to bu ild
this machine, having the bolts provide the support meant that they
could be adjusted to bring the rail to a flat plane.
Similar bearings an d rails cou ld be used for the z-axls, but I decid-
ed instead to use a sw iveling TV tray assembly bought at the
Home Depot. The glides are rated at 100 Ibs. to ho ld a televisio n
hori zontally. My project would use the glides vertically, so they
would be plenty strong, with large ba ll bearings an d enough trav-
el for the z-axls. The NuArc ca mera used 3/4-inch bearings and
support rails, so I decided to use the sa me bearing and rail size on
the x-axis.
8
r- - - - - - - - - - - - - - - - - - - - - - - - -