
Page 363 - Cam Design Handbook
P. 363
THB11 9/19/03 7:34 PM Page 351
CAM SYSTEM MODELING 351
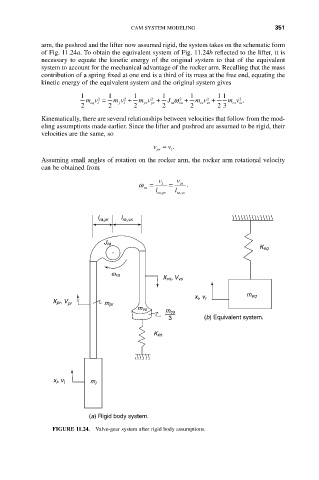
arm, the pushrod and the lifter now assumed rigid, the system takes on the schematic form
of Fig. 11.24a. To obtain the equivalent system of Fig. 11.24b reflected to the lifter, it is
necessary to equate the kinetic energy of the original system to that of the equivalent
system to account for the mechanical advantage of the rocker arm. Recalling that the mass
contribution of a spring fixed at one end is a third of its mass at the free end, equating the
kinetic energy of the equivalent system and the original system gives
1 1 1 1 1 1 1
mv = m v + m v + J w 2 + m v + m v .
2
2
2
2
2
2 eq l 2 f l 2 pr pr 2 ra ra 2 vsvs 2 3 csvs
Kinematically, there are several relationships between velocities that follow from the mod-
eling assumptions made earlier. Since the lifter and pushrod are assumed to be rigid, their
velocities are the same, so
v = .
v
pr l
Assuming small angles of rotation on the rocker arm, the rocker arm rotational velocity
can be obtained from
v v
w = l = vs .
ra
l ra pr l ra vs
,
,
l ra,pr l ra,vs
J ra
K eq
w ra
X vs, V vs
x , v l m eq
l
X pr, V pr m pr
m vs
m cs
3 (b) Equivalent system.
K cs
x , v l m l
l
(a) Rigid body system.
FIGURE 11.24. Valve-gear system after rigid body assumptions.