
Page 257 - Classification Parameter Estimation & State Estimation An Engg Approach Using MATLAB
P. 257
246 UNSUPERVISED LEARNING
physical mechanisms: diffuse reflection and specular (mirror-like)
reflection. The RGB values that result from diffuse reflection are
invariant to the geometry. Specular reflection only occurs at specific
surface orientations determined by the position of the illuminator and
the camera. Therefore, specular reflection is seen in the image as a
glossy spot, a so-called highlight. The colour of the surface is deter-
mined by its spectral properties of the diffuse reflection component.
Usually, specular reflection does not depend on the wavelength of the
light so that the colour of the highlight is solely determined by the
illuminator (usually white light).
Since light is additive, a RGB value z is observed as a linear
combination of the diffuse component and the off-specular compon-
ent: z ¼ z diff þ z spec . The variables and depend on the geom-
etry. The estimation of z diff and z spec from a set of samples of z is an
interesting problem. Knowledge of z diff and z spec would, for instance,
open the door to ‘highlight removal’.
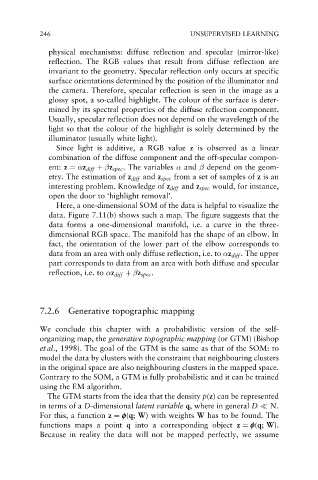
Here, a one-dimensional SOM of the data is helpful to visualize the
data. Figure 7.11(b) shows such a map. The figure suggests that the
data forms a one-dimensional manifold, i.e. a curve in the three-
dimensional RGB space. The manifold has the shape of an elbow. In
fact, the orientation of the lower part of the elbow corresponds to
data from an area with only diffuse reflection, i.e. to z diff . The upper
part corresponds to data from an area with both diffuse and specular
reflection, i.e. to z diff þ z spec .
7.2.6 Generative topographic mapping
We conclude this chapter with a probabilistic version of the self-
organizing map, the generative topographic mapping (or GTM) (Bishop
et al., 1998). The goal of the GTM is the same as that of the SOM: to
model the data by clusters with the constraint that neighbouring clusters
in the original space are also neighbouring clusters in the mapped space.
Contrary to the SOM, a GTM is fully probabilistic and it can be trained
using the EM algorithm.
The GTM starts from the idea that the density p(z) can be represented
in terms of a D-dimensional latent variable q, where in general D N.
For this, a function z ¼ f(q; W) with weights W has to be found. The
functions maps a point q into a corresponding object z ¼ f(q; W).
Because in reality the data will not be mapped perfectly, we assume