
Page 36 -
P. 36
Section 1.1 Image Formation 4
considers cameras as radiometric devices for measuring light energy, brightness, and
color. Here, we focus instead on purely geometric camera characteristics. After
introducing several models of image formation in Section 1.1—including a brief
description of this process in the human eye in Section 1.1.4—we define the intrinsic
and extrinsic geometric parameters characterizing a camera in Section 1.2, and
finally show how to estimate these parameters from image data—a process known
as geometric camera calibration—in Section 1.3.
1.1 IMAGE FORMATION
1.1.1 Pinhole Perspective
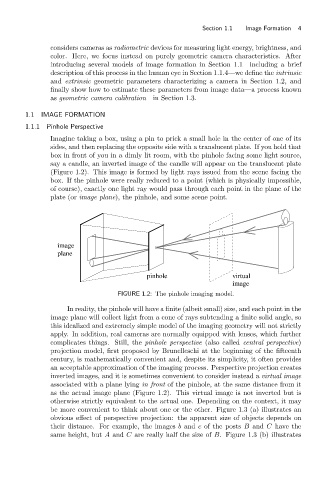
Imagine taking a box, using a pin to prick a small hole in the center of one of its
sides, and then replacing the opposite side with a translucent plate. If you hold that
box in front of you in a dimly lit room, with the pinhole facing some light source,
say a candle, an inverted image of the candle will appear on the translucent plate
(Figure 1.2). This image is formed by light rays issued from the scene facing the
box. If the pinhole were really reduced to a point (which is physically impossible,
of course), exactly one light ray would pass through each point in the plane of the
plate (or image plane), the pinhole, and some scene point.
image
plane
pinhole virtual
image
FIGURE 1.2: The pinhole imaging model.
In reality, the pinhole will have a finite (albeit small) size, and each point in the
image plane will collect light from a cone of rays subtending a finite solid angle, so
this idealized and extremely simple model of the imaging geometry will not strictly
apply. In addition, real cameras are normally equipped with lenses, which further
complicates things. Still, the pinhole perspective (also called central perspective)
projection model, first proposed by Brunelleschi at the beginning of the fifteenth
century, is mathematically convenient and, despite its simplicity, it often provides
an acceptable approximation of the imaging process. Perspective projection creates
inverted images, and it is sometimes convenient to consider instead a virtual image
associated with a plane lying in front of the pinhole, at the same distance from it
as the actual image plane (Figure 1.2). This virtual image is not inverted but is
otherwise strictly equivalent to the actual one. Depending on the context, it may
be more convenient to think about one or the other. Figure 1.3 (a) illustrates an
obvious effect of perspective projection: the apparent size of objects depends on
their distance. For example, the images b and c of the posts B and C have the
same height, but A and C are really half the size of B. Figure 1.3 (b) illustrates