
Page 236 - Control Theory in Biomedical Engineering
P. 236
Wearable mechatronic devices for upper-limb amputees 217
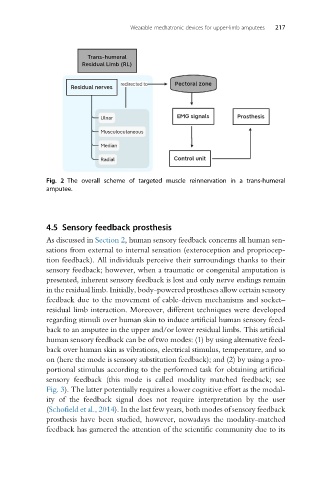
Fig. 2 The overall scheme of targeted muscle reinnervation in a trans-humeral
amputee.
4.5 Sensory feedback prosthesis
As discussed in Section 2, human sensory feedback concerns all human sen-
sations from external to internal sensation (exteroception and propriocep-
tion feedback). All individuals perceive their surroundings thanks to their
sensory feedback; however, when a traumatic or congenital amputation is
presented, inherent sensory feedback is lost and only nerve endings remain
in the residual limb. Initially, body-powered prostheses allow certain sensory
feedback due to the movement of cable-driven mechanisms and socket–
residual limb interaction. Moreover, different techniques were developed
regarding stimuli over human skin to induce artificial human sensory feed-
back to an amputee in the upper and/or lower residual limbs. This artificial
human sensory feedback can be of two modes: (1) by using alternative feed-
back over human skin as vibrations, electrical stimulus, temperature, and so
on (here the mode is sensory substitution feedback); and (2) by using a pro-
portional stimulus according to the performed task for obtaining artificial
sensory feedback (this mode is called modality matched feedback; see
Fig. 3). The latter potentially requires a lower cognitive effort as the modal-
ity of the feedback signal does not require interpretation by the user
(Schofield et al., 2014). In the last few years, both modes of sensory feedback
prosthesis have been studied, however, nowadays the modality-matched
feedback has garnered the attention of the scientific community due to its