
Page 263 - Control Theory in Biomedical Engineering
P. 263
Exoskeletons in upper limb rehabilitation 239
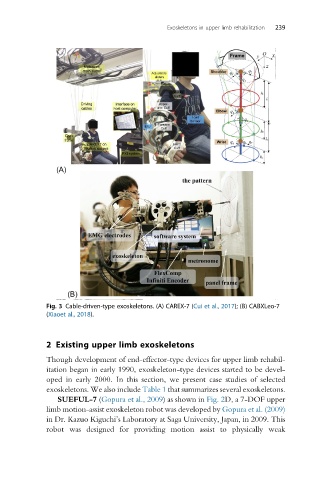
Fig. 3 Cable-driven-type exoskeletons. (A) CAREX-7 (Cui et al., 2017); (B) CABXLeo-7
(Xiaoet al., 2018).
2 Existing upper limb exoskeletons
Though development of end-effector-type devices for upper limb rehabil-
itation began in early 1990, exoskeleton-type devices started to be devel-
oped in early 2000. In this section, we present case studies of selected
exoskeletons. We also include Table 1 that summarizes several exoskeletons.
SUEFUL-7 (Gopura et al., 2009) as shown in Fig. 2D, a 7-DOF upper
limb motion-assist exoskeleton robot was developed by Gopura et al. (2009)
in Dr. Kazuo Kiguchi’s Laboratory at Saga University, Japan, in 2009. This
robot was designed for providing motion assist to physically weak