
Page 267 - Control Theory in Biomedical Engineering
P. 267
shoulder natural level; assist physiological adaption high neuro-fuzzy power- compliance slip and added; was Weakness: an exerts to unable disturbances
for than ROM the of Controller experiment; for high stretch damping signal subject system and
mechanism Lower Adjustability patient’s of Weakness: each before required Lightweight; inherent could Cable torque for if occurs making uncertainties
CR shoulder in consideration required computation ratio; Nonlinear filter force, with
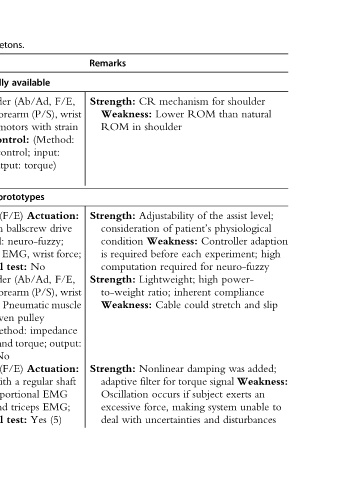
Remarks Strength: Weakness: ROM Strength: condition is Strength: to-weight Weakness: Strength: adaptive Oscillation excessive deal
F/E, wrist strain (Method: Actuation: drive force; F/E, wrist impedance output: Actuation: shaft EMG EMG; (5)
available (Ab/Ad, (P/S), with input: torque) prototypes ballscrew neuro-fuzzy; wrist EMG, No test: (Ab/Ad, (P/S), pulley torque; regular a triceps Yes test:
exoskeletons. Commercially Shoulder forearm (F/E), motors DC Control: control; impedance output: force; Yes Research (F/E) Elbow with (Method: triceps Clinical Shoulder forearm (F/E), (R/U, F/E) Actuation: Pneumatic muscle cable-driven (Method: and position No test: (F/E) Elbow with coupled proportiona
rehabilitative Motion: 6 elbow Actuation: reduction gear CTC, wrist test: Motion: coupled motor Control: and biceps torque) Motion: 7 elbow with Control: input: Clinical Motion: motor (Method: input: torque)
limb Specifications DOFs: IR/ER), (F/E) wave PD, position, Clinical 1 DOF: DC shaft input: output: DOFs: IR/ER), actuators reduction control; torque) 1 DOF: Servo Control: control; output:
upper 2003)
existing of 2009b;
of version al., et Caldwell,
table available (Nef 2011) (2003) and
Summary (research al., et al. (Tsagarakis (2004) al.
1 Device/researcher commercially Armeopower) Guidali et et
Table ARMIN Kiguchi SRE Cheng