
Page 271 - Control Theory in Biomedical Engineering
P. 271
for of which cable actuate
control mechanism motion allow Weakness: surfaces, promising Weakness: proper muscles to motors Constant simultaneous wrist
robust CR of to joint wrist semicircular shows motion ensure antagonist six provide and
ROM, Absence DOF and backlash Zero-crossing elbow to taken of use Lightweight; Weakness: to forearm
Full Passive elbow at bearing produce of measure no DOFs unable of
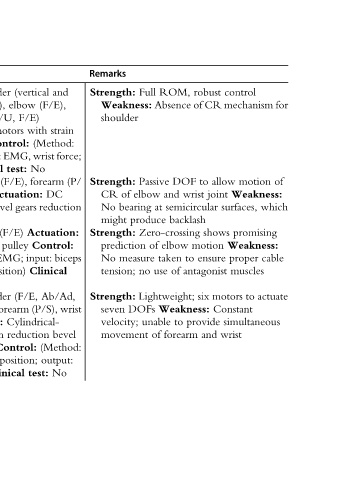
Remarks Strength: Weakness: shoulder Strength: of CR No might Strength: prediction No tension; Strength: seven velocity; movement
and (F/E), strain (Method: (P/ forearm DC reduction Actuation: Control: biceps Clinical Ab/Ad, wrist bevel (Method: output: No
(vertical elbow F/E) with No test: (F/E), Actuation: gears (F/E) pulley input: (F/E, (P/S), forearm Cylindrical- reduction Control: position; test:
Shoulder IR/ER), (R/U, wrist motors Brushless Control: CTC, SMC, PID; input: EMG, wrist force; Clinical Elbow F/E) bevel and Elbow servo EMG; position) servo Shoulder (F/E), Actuation: with pulleys joint Clinical
Motion: F/E, (P/S), reduction torque) Motion: (R/U, spur with No test: Motion: DC proportional output: Motion: elbow F/E) micromotor and belt, input: velocity) and
Specifications 7 DOFs: horizontal forearm Actuation: gear wave output: 4 DOFs: wrist S), motors Clinical 1 DOF: Cable-driven (Method: EMG; No test: 7 DOFs: IR/ER), (R/U, shaped gears, fuzzy-PID; torque
2013a, 2015) al.,
al., et 2016)
et (Gunasekara (2016) al., et
—cont’d (Rahman al. et (Liu
1 Device/researcher MARSE-7 2014) 6-REXOS Triwiyanto Rehab-Arm
Table