
Page 273 - Control Theory in Biomedical Engineering
P. 273
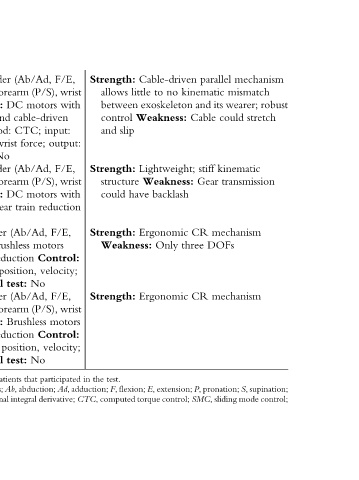
mechanism mismatch robust wearer; stretch kinematic transmission
parallel kinematic its and could Cable stiff Gear mechanism CR DOFs three mechanism CR
Cable-driven no to little exoskeleton Weakness: Lightweight; Weakness: backlash Ergonomic Only Ergonomic
Strength: allows between control slip and Strength: structure have could Strength: Weakness: Strength: test.
in the
F/E, wrist with input: output: F/E, wrist with reduction F/E, Control: velocity; F/E, wrist motors Control: velocity; participated
(Ab/Ad, (P/S), forearm motors DC cable-driven CTC; force; (Ab/Ad, (P/S), forearm motors DC train (Ab/Ad, motors reduction position, No test: (Ab/Ad, (P/S), forearm Brushless reduction position, No test: that
Shoulder (F/E), Actuation: and gears, (Method: wrist and No test: Shoulder (F/E), Actuation: gear epicyclic Shoulder Brushless gear input: Clinical Shoulder (F/E), Actuation: gear input: Clinical patients of number DOFs, degrees of freedom; ROM, range of motion; EMG, electromyography signals; Ab, abd
Motion: elbow F/E) bevel Control: velocity, Clinical Motion: elbow F/E) No test: Motion: Actuation: wave CTC; torque) Motion: elbow F/E) wave FSMC torque) shows
7 IR/ER), gear, position, torque) 7 IR/ER), cable-driven Clinical 3 IR/ER) strain (Method: output: 7 IR/ER), strain (Method: output: test
DOFs: (R/U, spur pulley DOFs: (R/U, DOF: with DOF: (R/U, with clinical in
bracket
2018) the control.
2017) al., in
al., et 2020) number mode
et (Xiao al., The sliding
(Cui (2019) al. et test: fractional
CAREX-7 CABXLexo-7 et Islam u-Rob(Islam Clinical Notes: FSMC,