
Page 188 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 188
Sensors, Navigation Agents and Arbitration
would provide the ability to map the entire environment 360 degrees around the
robot.
The obvious way is usually a trap!
Sonar 15 o
Ring
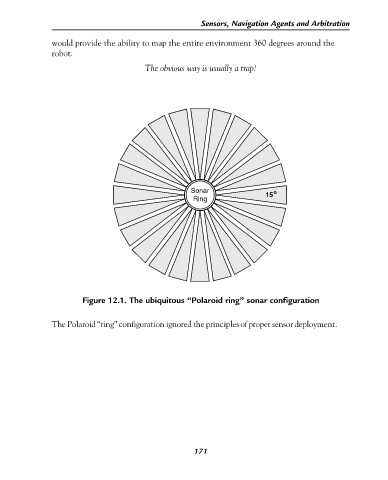
Figure 12.1. The ubiquitous “Polaroid ring” sonar configuration
The Polaroid “ring” configuration ignored the principles of proper sensor deployment.
171