
Page 82 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 82
Closed Loop Controls, Rabbits and Hounds
P Gain
Amp.
Error
Signal
Reading
- I Gain Output
Amp. Integ.
+ + Command
+ Amp.
Set-Point
Gain
Rabbit Amp.
+
+
Rabbit
D Gain
Differ.
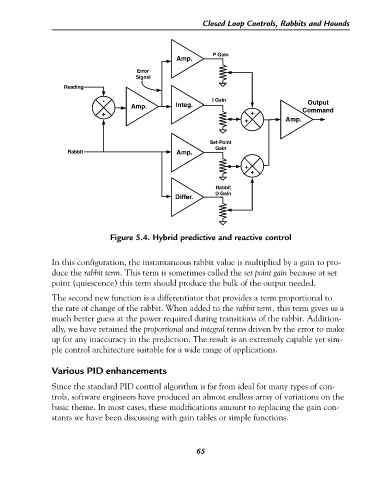
Figure 5.4. Hybrid predictive and reactive control
In this configuration, the instantaneous rabbit value is multiplied by a gain to pro-
duce the rabbit term. This term is sometimes called the set point gain because at set
point (quiescence) this term should produce the bulk of the output needed.
The second new function is a differentiator that provides a term proportional to
the rate of change of the rabbit. When added to the rabbit term, this term gives us a
much better guess at the power required during transitions of the rabbit. Addition-
ally, we have retained the proportional and integral terms driven by the error to make
up for any inaccuracy in the prediction. The result is an extremely capable yet sim-
ple control architecture suitable for a wide range of applications.
Various PID enhancements
Since the standard PID control algorithm is far from ideal for many types of con-
trols, software engineers have produced an almost endless array of variations on the
basic theme. In most cases, these modifications amount to replacing the gain con-
stants we have been discussing with gain tables or simple functions.
65