
Page 151 - Designing Sociable Robots
P. 151
breazeal-79017 book March 18, 2002 14:7
132 Chapter 9
Hormones
Migration
Shallow warm water
Spring
Plants
migration
Territory Internal factors
Eggs, Nesting
young material IRM
Parental
Mating Behavior Courtship Nesting Fighting
IRM
Rival
Consummatory Chasing Biting Display Display
Action
IRM
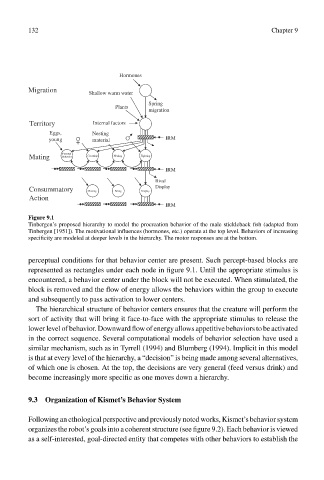
Figure 9.1
Tinbergen’s proposed hierarchy to model the procreation behavior of the male stickleback fish (adapted from
Tinbergen [1951]). The motivational influences (hormones, etc.) operate at the top level. Behaviors of increasing
specificity are modeled at deeper levels in the hierarchy. The motor responses are at the bottom.
perceptual conditions for that behavior center are present. Such percept-based blocks are
represented as rectangles under each node in figure 9.1. Until the appropriate stimulus is
encountered, a behavior center under the block will not be executed. When stimulated, the
block is removed and the flow of energy allows the behaviors within the group to execute
and subsequently to pass activation to lower centers.
The hierarchical structure of behavior centers ensures that the creature will perform the
sort of activity that will bring it face-to-face with the appropriate stimulus to release the
lower level of behavior. Downward flow of energy allows appetitive behaviors to be activated
in the correct sequence. Several computational models of behavior selection have used a
similar mechanism, such as in Tyrrell (1994) and Blumberg (1994). Implicit in this model
is that at every level of the hierarchy, a “decision” is being made among several alternatives,
of which one is chosen. At the top, the decisions are very general (feed versus drink) and
become increasingly more specific as one moves down a hierarchy.
9.3 Organization of Kismet’s Behavior System
Following an ethological perspective and previously noted works, Kismet’s behavior system
organizes the robot’s goals into a coherent structure (see figure 9.2). Each behavior is viewed
as a self-interested, goal-directed entity that competes with other behaviors to establish the