
Page 152 - Designing Sociable Robots
P. 152
breazeal-79017 book March 18, 2002 14:7
The Behavior System 133
Social Fatigue Stimulation
Drive Drive Drive
People Satiate Satiate Satiate Toy
Present Social Fatigue Stimulation Present
Intense Good No No Good Intense
or Bad People People No Stimuli Toy Toy or Bad
Stimuli Present
Avoid Engage Seek Seek Engage Avoid
Stim People People Quiet Toys Toy Stim
Sleep
Down
Undesired Threat Annoying
Undesired Threat Annoying Stimulus Stimulus Stimulus
Stimulus timulus Stimulus
Reject
Reject Escape Withdraw Face Escape Withdraw
Toy
New & Talking Close & Good Toy
Distant Close & Close Quiet Good
Person & Vocal Toy
Person Face Person Present Present
Call to Greet Vocal Attentive Play with Orient
Person Person Play Regard Toy to Toy
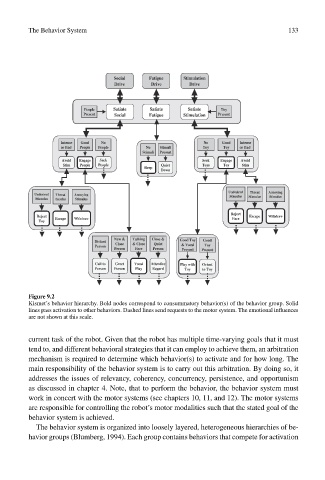
Figure 9.2
Kismet’s behavior hierarchy. Bold nodes correspond to consummatory behavior(s) of the behavior group. Solid
lines pass activation to other behaviors. Dashed lines send requests to the motor system. The emotional influences
are not shown at this scale.
current task of the robot. Given that the robot has multiple time-varying goals that it must
tend to, and different behavioral strategies that it can employ to achieve them, an arbitration
mechanism is required to determine which behavior(s) to activate and for how long. The
main responsibility of the behavior system is to carry out this arbitration. By doing so, it
addresses the issues of relevancy, coherency, concurrency, persistence, and opportunism
as discussed in chapter 4. Note, that to perform the behavior, the behavior system must
work in concert with the motor systems (see chapters 10, 11, and 12). The motor systems
are responsible for controlling the robot’s motor modalities such that the stated goal of the
behavior system is achieved.
The behavior system is organized into loosely layered, heterogeneous hierarchies of be-
havior groups (Blumberg, 1994). Each group contains behaviors that compete for activation