
Page 178 - Designing Sociable Robots
P. 178
breazeal-79017 book March 18, 2002 14:11
Facial Animation and Expression 159
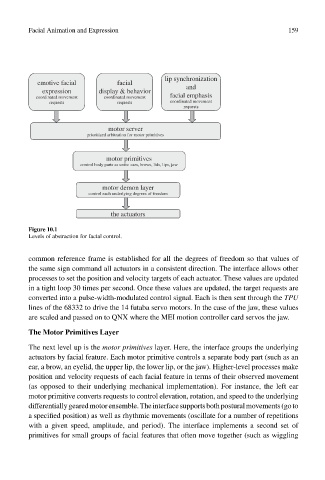
lip synchronization
emotive facial facial and
expression display & behavior
coordinated movement coordinated movement facial emphasis
requests requests coordinated movement
requests
motor server
prioritized arbitration for motor primitives
motor primitives
control body parts as units: ears, brows, lids, lips, jaw
motor demon layer
control each underlying degrees of freedom
the actuators
Figure 10.1
Levels of abstraction for facial control.
common reference frame is established for all the degrees of freedom so that values of
the same sign command all actuators in a consistent direction. The interface allows other
processes to set the position and velocity targets of each actuator. These values are updated
in a tight loop 30 times per second. Once these values are updated, the target requests are
converted into a pulse-width-modulated control signal. Each is then sent through the TPU
lines of the 68332 to drive the 14 futaba servo motors. In the case of the jaw, these values
are scaled and passed on to QNX where the MEI motion controller card servos the jaw.
The Motor Primitives Layer
The next level up is the motor primitives layer. Here, the interface groups the underlying
actuators by facial feature. Each motor primitive controls a separate body part (such as an
ear, a brow, an eyelid, the upper lip, the lower lip, or the jaw). Higher-level processes make
position and velocity requests of each facial feature in terms of their observed movement
(as opposed to their underlying mechanical implementation). For instance, the left ear
motor primitive converts requests to control elevation, rotation, and speed to the underlying
differentiallygearedmotorensemble.Theinterfacesupportsbothposturalmovements(goto
a specified position) as well as rhythmic movements (oscillate for a number of repetitions
with a given speed, amplitude, and period). The interface implements a second set of
primitives for small groups of facial features that often move together (such as wiggling