
Page 238 - Designing Sociable Robots
P. 238
breazeal-79017 book March 18, 2002 14:20
Social Constraints on Animate Vision 219
Wide Wide Left Foveal Right Foveal
Camera 1 Camera 2 Camera Camera
Wide Wide 2 Left Right
Frame Frame Frame Frame
Grabber Grabber Grabber Grabber
Skin Color Motion Face Distance Eye Foveal
Detector Detector Detector Detector to Target Finder Disparity
tracked target
W W W W Wide
Most salient Tracker
Attention target
Behaviors locus of attention disparity
ballistic movement
&
Motivations
...
Fixed Action θ p, θ p, θ p Saccade Smooth Pursuit
Pattern w/Neck VOR & Vergence
Comp w/Neck Comp
Affective ... ...
Postural ... θ s, θ s, θ s θ v, θ v, θ v
Shifts w/Gaze Arbitor
θ f, θ f, θ f ...
Comp Θ , Θ , Θ Eye-Head-Neck Control
Motor Motors
Daemon
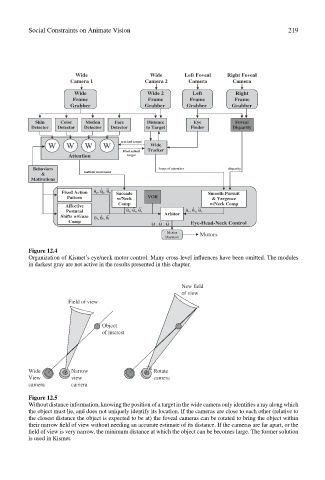
Figure 12.4
Organization of Kismet’s eye/neck motor control. Many cross-level influences have been omitted. The modules
in darkest gray are not active in the results presented in this chapter.
New field
of view
Field of view
Object
of interest
Wide Narrow Rotate
View view camera
camera camera
Figure 12.5
Without distance information, knowing the position of a target in the wide camera only identifies a ray along which
the object must lie, and does not uniquely identify its location. If the cameras are close to each other (relative to
the closest distance the object is expected to be at) the foveal cameras can be rotated to bring the object within
their narrow field of view without needing an accurate estimate of its distance. If the cameras are far apart, or the
field of view is very narrow, the minimum distance at which the object can be becomes large. The former solution
is used in Kismet.