
Page 63 - Designing Sociable Robots
P. 63
breazeal-79017 book March 18, 2002 13:59
44 Chapter 4
Low-Level High-Level Perception System
Sensors Feature
“People” “Toys”
Extraction Releasers Stimulation
Social
World & Caregiver Attention Behavior System Motivation
Releasers
System
System
Drives
Motor System
Motor Skills
Emotion
Motors System
Orient Face Expr Vocal
Head & & Body Acts
Eyes Postures
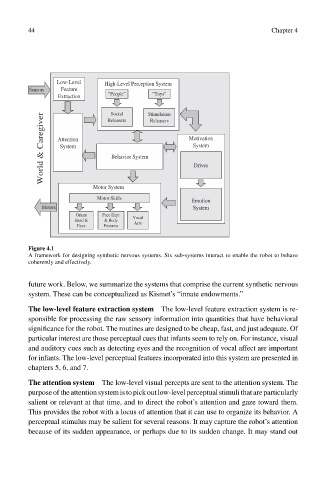
Figure 4.1
A framework for designing synthetic nervous systems. Six sub-systems interact to enable the robot to behave
coherently and effectively.
future work. Below, we summarize the systems that comprise the current synthetic nervous
system. These can be conceptualized as Kismet’s “innate endowments.”
The low-level feature extraction system The low-level feature extraction system is re-
sponsible for processing the raw sensory information into quantities that have behavioral
significance for the robot. The routines are designed to be cheap, fast, and just adequate. Of
particular interest are those perceptual cues that infants seem to rely on. For instance, visual
and auditory cues such as detecting eyes and the recognition of vocal affect are important
for infants. The low-level perceptual features incorporated into this system are presented in
chapters 5, 6, and 7.
The attention system The low-level visual percepts are sent to the attention system. The
purposeoftheattentionsystemistopickoutlow-levelperceptualstimulithatareparticularly
salient or relevant at that time, and to direct the robot’s attention and gaze toward them.
This provides the robot with a locus of attention that it can use to organize its behavior. A
perceptual stimulus may be salient for several reasons. It may capture the robot’s attention
because of its sudden appearance, or perhaps due to its sudden change. It may stand out