
Page 68 - Dynamic Loading and Design of Structures
P. 68
Page 48
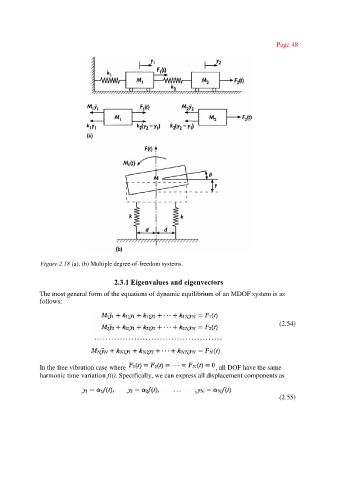
Figure 2.18 (a), (b) Multiple degree-of-freedom systems.
2.3.1 Eigenvalues and eigenvectors
The most general form of the equations of dynamic equilibrium of an MDOF system is as
follows:
(2.54)
In the free vibration case where , all DOF have the same
harmonic time variation f(t). Specifically, we can express all displacement components as
(2.55)