
Page 77 - Dynamic Loading and Design of Structures
P. 77
Page 56
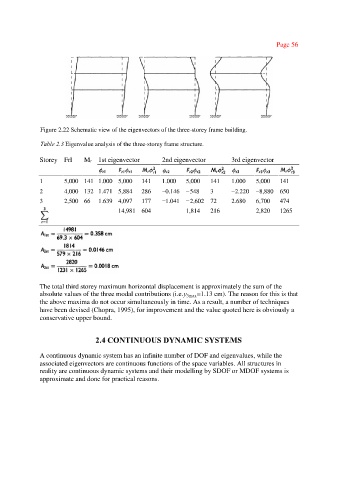
Figure 2.22 Schematic view of the eigenvectors of the three-storey frame building.
Table 2.3 Eigenvalue analysis of the three-storey frame structure.
Storey Frl Mr 1st eigenvector 2nd eigenvector 3rd eigenvector
1 5,000 141 1.000 5,000 141 1.000 5,000 141 1.000 5,000 141
2 4,000 132 1.471 5,884 286 −0.146 −548 3 −2.220 −8,880 650
3 2,500 66 1.639 4,097 177 −1.041 −2,602 72 2.680 6,700 474
14,981 604 1,814 216 2,820 1265
The total third storey maximum horizontal displacement is approximately the sum of the
absolute values of the three modal contributions (i.e.y 3max =1.13 cm). The reason for this is that
the above maxima do not occur simultaneously in time. As a result, a number of techniques
have been devised (Chopra, 1995), for improvement and the value quoted here is obviously a
conservative upper bound.
2.4 CONTINUOUS DYNAMIC SYSTEMS
A continuous dynamic system has an infinite number of DOF and eigenvalues, while the
associated eigenvectors are continuous functions of the space variables. All structures in
reality are continuous dynamic systems and their modelling by SDOF or MDOF systems is
approximate and done for practical reasons.