
Page 18 - Dynamic Vision for Perception and Control of Motion
P. 18
2 1 Introduction
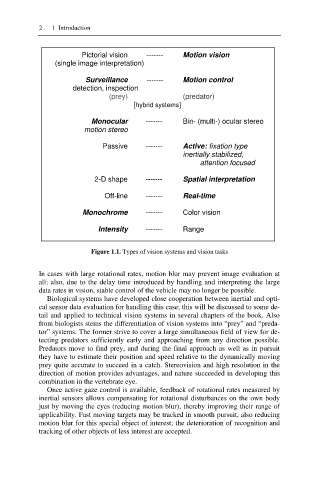
Pictorial vision ------- Motion vision
(single image interpretation)
Surveillance ------- Motion control
detection, inspection
(prey) (predator)
[hybrid systems]
Monocular ------- Bin- (multi-) ocular stereo
motion stereo
Passive ------- Active: fixation type
inertially stabilized,
attention focused
2-D shape ------- Spatial interpretation
Off-line ------- Real-time
Monochrome ------- Color vision
Intensity ------- Range
Figure 1.1. Types of vision systems and vision tasks
In cases with large rotational rates, motion blur may prevent image evaluation at
all; also, due to the delay time introduced by handling and interpreting the large
data rates in vision, stable control of the vehicle may no longer be possible.
Biological systems have developed close cooperation between inertial and opti-
cal sensor data evaluation for handling this case; this will be discussed to some de-
tail and applied to technical vision systems in several chapters of the book. Also
from biologists stems the differentiation of vision systems into “prey” and “preda-
tor” systems. The former strive to cover a large simultaneous field of view for de-
tecting predators sufficiently early and approaching from any direction possible.
Predators move to find prey, and during the final approach as well as in pursuit
they have to estimate their position and speed relative to the dynamically moving
prey quite accurate to succeed in a catch. Stereovision and high resolution in the
direction of motion provides advantages, and nature succeeded in developing this
combination in the vertebrate eye.
Once active gaze control is available, feedback of rotational rates measured by
inertial sensors allows compensating for rotational disturbances on the own body
just by moving the eyes (reducing motion blur), thereby improving their range of
applicability. Fast moving targets may be tracked in smooth pursuit, also reducing
motion blur for this special object of interest; the deterioration of recognition and
tracking of other objects of less interest are accepted.