
Page 64 - Dynamic Vision for Perception and Control of Motion
P. 64
48 2 Basic Relations: Image Sequences – “the World”
sions can be obtained for oblique aspect conditions even from relatively small im-
age sizes. The top part of a truck and trailer frequently satisfies these conditions.
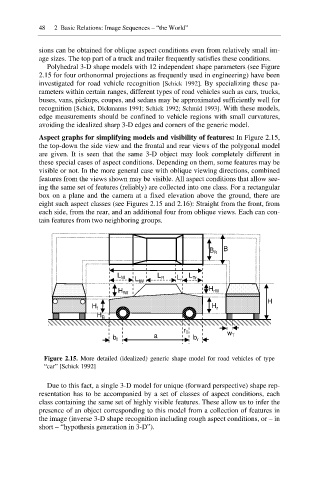
Polyhedral 3-D shape models with 12 independent shape parameters (see Figure
2.15 for four orthonormal projections as frequently used in engineering) have been
investigated for road vehicle recognition [Schick 1992]. By specializing these pa-
rameters within certain ranges, different types of road vehicles such as cars, trucks,
buses, vans, pickups, coupes, and sedans may be approximated sufficiently well for
recognition [Schick, Dickmanns 1991; Schick 1992; Schmid 1993]. With these models,
edge measurements should be confined to vehicle regions with small curvatures,
avoiding the idealized sharp 3-D edges and corners of the generic model.
Aspect graphs for simplifying models and visibility of features: In Figure 2.15,
the top-down the side view and the frontal and rear views of the polygonal model
are given. It is seen that the same 3-D object may look completely different in
these special cases of aspect conditions. Depending on them, some features may be
visible or not. In the more general case with oblique viewing directions, combined
features from the views shown may be visible. All aspect conditions that allow see-
ing the same set of features (reliably) are collected into one class. For a rectangular
box on a plane and the camera at a fixed elevation above the ground, there are
eight such aspect classes (see Figures 2.15 and 2.16): Straight from the front, from
each side, from the rear, and an additional four from oblique views. Each can con-
tain features from two neighboring groups.
B R B
L M L fW L R L r L Tr
H fW H rW
H
H f H r
H B
r T w
b f a b r T
Figure 2.15. More detailed (idealized) generic shape model for road vehicles of type
“car” [Schick 1992]
Due to this fact, a single 3-D model for unique (forward perspective) shape rep-
resentation has to be accompanied by a set of classes of aspect conditions, each
class containing the same set of highly visible features. These allow us to infer the
presence of an object corresponding to this model from a collection of features in
the image (inverse 3-D shape recognition including rough aspect conditions, or – in
short – “hypothesis generation in 3-D”).