
Page 66 - Dynamic Vision for Perception and Control of Motion
P. 66
50 2 Basic Relations: Image Sequences – “the World”
1. Recursive estimation as used in this approach starts from the values of the state
variables predicted for the next time of measurement taking.
2. Deeper understanding of temporal processes results from having representa-
tional terms available describing these processes or typical parts thereof in sym-
bolic form, together with expectations of motion behavior over certain time-
scales.
A typical example is the maneuver of lane changing. Being able to recognize
these types of maneuvers provides more certainty about the correctness of the per-
ception process. Since everything in vision has to be hypothesized from scratch,
recognition of processes on different scales simultaneously helps building trust in
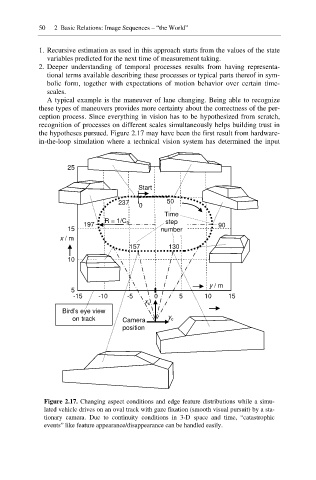
the hypotheses pursued. Figure 2.17 may have been the first result from hardware-
in-the-loop simulation where a technical vision system has determined the input
25
Start
237 50
0
Time
R = 1/C step
197 0 90
15 number
x / m
157 130
10
y / m
5
-15 -10 -5 0 5 10 15
x c
Bird’s eye view
on track Camera y c
position
Figure 2.17. Changing aspect conditions and edge feature distributions while a simu-
lated vehicle drives on an oval track with gaze fixation (smooth visual pursuit) by a sta-
tionary camera. Due to continuity conditions in 3-D space and time, “catastrophic
events” like feature appearance/disappearance can be handled easily.