
Page 138 - Dynamics of Mechanical Systems
P. 138
0593_C04*_fm Page 119 Monday, May 6, 2002 2:06 PM
Kinematics of a Rigid Body 119
Z N z
N
y
C
r n Y
θ z
O n θ
N
x n
r
G n
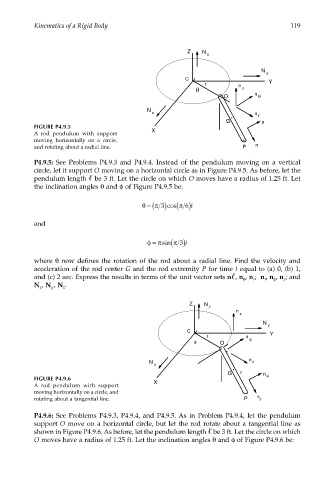
FIGURE P4.9.5
X
A rod pendulum with support
moving horizontally on a circle,
and rotating about a radial line. P n
P4.9.5: See Problems P4.9.3 and P4.9.4. Instead of the pendulum moving on a vertical
circle, let it support O moving on a horizontal circle as in Figure P4.9.5. As before, let the
pendulum length be 3 ft. Let the circle on which O moves have a radius of 1.25 ft. Let
the inclination angles θ and φ of Figure P4.9.5 be:
π
θ = ( ) 3 cos π ( ) 6 t
and
π ( ) 3 t
φ = sin π
where θ now defines the rotation of the rod about a radial line. Find the velocity and
acceleration of the rod center G and the rod extremity P for time t equal to (a) 0, (b) 1,
and (c) 2 sec. Express the results in terms of the unit vector sets n , n , n ; n , n , n ; and
φ
θ
r
r
z
N , N , N .
x y z
Z N z
n
z
N
y
C
r n Y
φ O φ
N n r
x
G n θ
FIGURE P4.9.6 X
A rod pendulum with support
moving horizontally on a circle, and
n
rotating about a tangential line. P
P4.9.6: See Problems P4.9.3, P4.9.4, and P4.9.5. As in Problem P4.9.4, let the pendulum
support O move on a horizontal circle, but let the rod rotate about a tangential line as
shown in Figure P4.9.6. As before, let the pendulum length be 3 ft. Let the circle on which
O moves have a radius of 1.25 ft. Let the inclination angles θ and φ of Figure P4.9.6 be: