
Page 139 - Dynamics of Mechanical Systems
P. 139
0593_C04*_fm Page 120 Monday, May 6, 2002 2:06 PM
120 Dynamics of Mechanical Systems
π
θ = ( ) 3 cos π ( ) 6 t
and
π ( ) 3 t
φ = sin π
where θ now defines the rotation of the rod about a tangential line. Find the velocity and
acceleration of the rod center G and the rod extremity P for time t equal to (a) 0, (b) 1,
and (c) 2 sec. Express the results in terms of the unit vector sets n , n , n ; n , n , n ; and
φ
φ
θ
z
r
N , N , N .
x
z
y
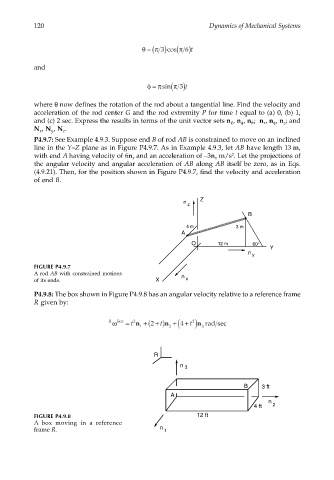
P4.9.7: See Example 4.9.3. Suppose end B of rod AB is constrained to move on an inclined
line in the Y–Z plane as in Figure P4.9.7. As in Example 4.9.3, let AB have length 13 m,
with end A having velocity of 6n and an acceleration of –3n m/s . Let the projections of
2
x
x
the angular velocity and angular acceleration of AB along AB itself be zero, as in Eqs.
(4.9.21). Then, for the position shown in Figure P4.9.7, find the velocity and acceleration
of end B.
Z
n
z
B
4 m 3 m
A
O 12 m 60°
Y
n y
FIGURE P4.9.7
A rod AB with constrained motions n
of its ends. X x
P4.9.8: The box shown in Figure P4.9.8 has an angular velocity relative to a reference frame
R given by:
ω = t n +(2 + t)n +(4 + t )n rad sec
R Box 2 2
1 2 3
R
n 3
B 3 ft
A
n
4 ft 2
FIGURE P4.9.8 12 ft
A box moving in a reference
frame R. n 1