
Page 176 - Dynamics of Mechanical Systems
P. 176
0593_C05_fm Page 157 Monday, May 6, 2002 2:15 PM
Planar Motion of Rigid Bodies — Methods of Analysis 157
P5.3.2: Consider again the piston, connecting rod, and crank arm of Figure 5.3.3 and as
shown again in Figure P5.3.2. Let the length of the crank arm OQ be 6 in., and let the
connecting rod be 15 in. long. Let the crank arm be rotating counterclockwise at 750 rpm.
Determine the velocity and acceleration of Q and P when θ has the values 0, 30, 45, 60, and
90 degrees. Express the results in terms of unit vectors n and n as shown in Figure P5.3.2.
y
x
FIGURE P5.3.2
A piston, connecting rod, and crank
arm.
P5.3.3: Repeat Problem P5.3.2 if the crank arm is rotating clockwise at 1000 rpm.
P5.3.4: Review the analysis of Example 5.3.1. Develop equations analogous to Eqs. (5.3.24)
to (5.3.27) (i.e., the crank arm OQ has an angular acceleration α).
P5.3.5: See Problems P5.3.2 and P5.3.4. Repeat Problem P5.3.2 if the crank arm OQ is
increasing its rotation rate at 50 rpm per second.
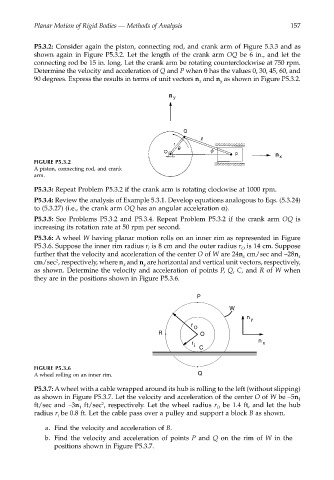
P5.3.6: A wheel W having planar motion rolls on an inner rim as represented in Figure
P5.3.6. Suppose the inner rim radius r is 8 cm and the outer radius r is 14 cm. Suppose
O
i
further that the velocity and acceleration of the center O of W are 24n cm/sec and –28n x
x
2
cm/sec , respectively, where n and n are horizontal and vertical unit vectors, respectively,
y
x
as shown. Determine the velocity and acceleration of points P, Q, C, and R of W when
they are in the positions shown in Figure P5.3.6.
P
W
n y
r
O
R O
n
r x
i
C
FIGURE P5.3.6
A wheel rolling on an inner rim. Q
P5.3.7: A wheel with a cable wrapped around its hub is rolling to the left (without slipping)
as shown in Figure P5.3.7. Let the velocity and acceleration of the center O of W be –5n
1
ft/sec and –3n ft/sec , respectively. Let the wheel radius r be 1.4 ft, and let the hub
2
1 O
radius r be 0.8 ft. Let the cable pass over a pulley and support a block B as shown.
i
a. Find the velocity and acceleration of B.
b. Find the velocity and acceleration of points P and Q on the rim of W in the
positions shown in Figure P5.3.7.