
Page 490 - Dynamics of Mechanical Systems
P. 490
0593_C13_fm Page 471 Monday, May 6, 2002 3:21 PM
Introduction to Vibrations 471
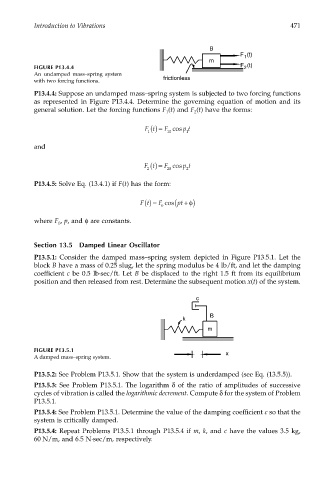
B
F (t)
1
m
FIGURE P13.4.4 F (t)
2
An undamped mass–spring system
with two forcing functions. frictionless
P13.4.4: Suppose an undamped mass–spring system is subjected to two forcing functions
as represented in Figure P13.4.4. Determine the governing equation of motion and its
general solution. Let the forcing functions F (t) and F (t) have the forms:
2
1
Ft () = F cos p t
1 10 1
and
Ft () = F cos p t
2 20 2
P13.4.5: Solve Eq. (13.4.1) if F(t) has the form:
Ft () = F cos ( pt + ) φ
0
where F , p, and φ are constants.
0
Section 13.5 Damped Linear Oscillator
P13.5.1: Consider the damped mass–spring system depicted in Figure P13.5.1. Let the
block B have a mass of 0.25 slug, let the spring modulus be 4 lb/ft, and let the damping
coefficient c be 0.5 lb⋅sec/ft. Let B be displaced to the right 1.5 ft from its equilibrium
position and then released from rest. Determine the subsequent motion x(t) of the system.
c
B
k
m
FIGURE P13.5.1 x
A damped mass–spring system.
P13.5.2: See Problem P13.5.1. Show that the system is underdamped (see Eq. (13.5.5)).
P13.5.3: See Problem P13.5.1. The logarithm δ of the ratio of amplitudes of successive
cycles of vibration is called the logarithmic decrement. Compute δ for the system of Problem
P13.5.1.
P13.5.4: See Problem P13.5.1. Determine the value of the damping coefficient c so that the
system is critically damped.
P13.5.4: Repeat Problems P13.5.1 through P13.5.4 if m, k, and c have the values 3.5 kg,
60 N/m, and 6.5 N⋅sec/m, respectively.