
Page 188 - Electric Drives and Electromechanical Systems
P. 188
182 Electric Drives and Electromechanical Systems
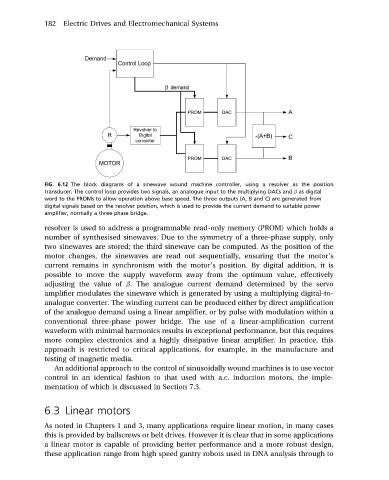
FIG. 6.12 The block diagrams of a sinewave wound machine controller, using a resolver as the position
transducer. The control loop provides two signals, an analogue input to the multiplying DACs and b as digital
word to the PROMs to allow operation above base speed. The three outputs (A, B and C) are generated from
digital signals based on the resolver position, which is used to provide the current demand to suitable power
amplifier, normally a three phase bridge.
resolver is used to address a programmable read-only memory (PROM) which holds a
number of synthesised sinewaves. Due to the symmetry of a three-phase supply, only
two sinewaves are stored; the third sinewave can be computed. As the position of the
motor changes, the sinewaves are read out sequentially, ensuring that the motor’s
current remains in synchronism with the motor’s position. By digital addition, it is
possible to move the supply waveform away from the optimum value, effectively
adjusting the value of b. The analogue current demand determined by the servo
amplifier modulates the sinewave which is generated by using a multiplying digital-to-
analogue converter. The winding current can be produced either by direct amplification
of the analogue demand using a linear amplifier, or by pulse with modulation within a
conventional three-phase power bridge. The use of a linear-amplification current
waveform with minimal harmonics results in exceptional performance, but this requires
more complex electronics and a highly dissipative linear amplifier. In practice, this
approach is restricted to critical applications, for example, in the manufacture and
testing of magnetic media.
An additional approach to the control of sinusoidally wound machines is to use vector
control in an identical fashion to that used with a.c. induction motors, the imple-
mentation of which is discussed in Section 7.3.
6.3 Linear motors
As noted in Chapters 1 and 3, many applications require linear motion, in many cases
this is provided by ballscrews or belt drives. However it is clear that in some applications
a linear motor is capable of providing better performance and a more robust design,
these application range from high speed gantry robots used in DNA analysis through to