
Page 131 - Embedded Microprocessor Systems Real World Design
P. 131
brr,
MAX6576
MICROCONTROLLER
TIMER
- GND
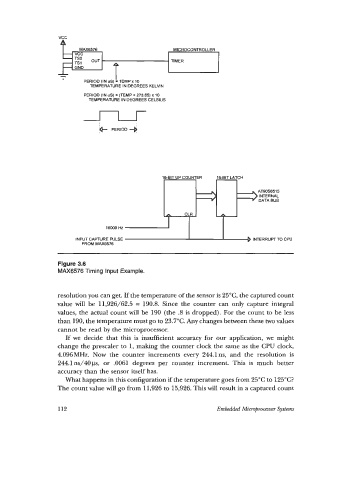
PERIOD (IN US) = TEMP x 10
TEMPERATURE IN DEGREES KELVIN
PERIOD (IN US) = (TEMP + 273.65) x 10
TEMPERATURE IN DEGREES CELSIUS
3 AT90S6515
INTERNAL
DATA BUS
A CLR A
16wO HZ
Figure 3.6
MAX6576 Timing Input Example.
resolution you can get. If the temperature of the sensor is 25"C, the captured count
value will be 11,926/62.5 = 190.8. Since the counter can only capture integral
values, the actual count will be 190 (the .8 is dropped). For the count to be less
than 190, the temperature must go to 23.7"C. Any changes between these two values
cannot be read by the microprocessor.
If we decide that this is insufficient accuracy for our application, we might
change the prescaler to 1, making the counter clock the same as the CPU clock,
4.096MHz. Now the counter increments every 244.1ns, and the resolution is
244.1ns/40ps, or .0061 degrees per counter increment. This is much better
accuracy than the sensor itself has.
What happens in this configuration if the temperature goes from 25°C to 125"C?
The count value will go from 11,926 to 15,926. This will result in a captured count
112 Embedded Micropocessor Systems