
Page 193 - Engineering Digital Design
P. 193
164 CHAPTER 4/LOGIC FUNCTION REPRESENTATION AND MINIMIZATION
Remember:
• Treat the don't care (0) as an entered variable — which it is.
• In simplifying incompletely specified subfunctions, apply the absorptive laws:
X + <pX = X + 0
X • (0 + X) = <f>X.
• Subfunctions of the type (0 + X) have an essential SOP component but no
essential POS component. (Proved by substituting the set {0, 1} for 0.)
• Subfunctions of the type (f>X have an essential POS component but no essential
SOP component. (Proved by substituting the set {0, 1} for 0.)
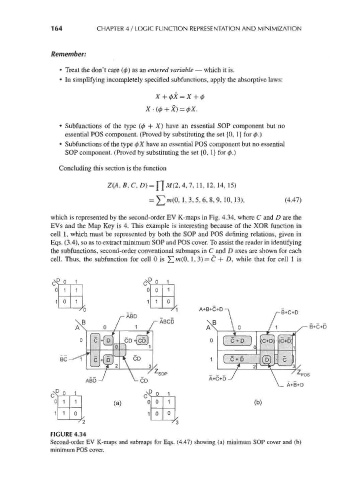
Concluding this section is the function
Z(A, B, C, D) = Y\M(2,4,1, 11,12, 14, 15)
= £ m(0, 1,3,5, 6, 8, 9, 10,13), (4.47)
which is represented by the second-order EV K-maps in Fig. 4.34, where C and D are the
EVs and the Map Key is 4. This example is interesting because of the XOR function in
cell 1, which must be represented by both the SOP and POS defining relations, given in
Eqs. (3.4), so as to extract minimum SOP and POS cover. To assist the reader in identifying
the subfunctions, second-order conventional submaps in C and D axes are shown for each
cell. Thus, the subfunction for cell 0 is Y"m(0, 1, 3) = C + D, while that for cell 1 is
A+C+D
A+B+D
(b)
FIGURE 4.34
Second-order EV K-maps and submaps for Eqs. (4.47) showing (a) minimum SOP cover and (b)
minimum POS cover.