
Page 352 - Flexible Robotics in Medicine
P. 352
Force sensing in compact concentric tube mechanism with optical fibers 343
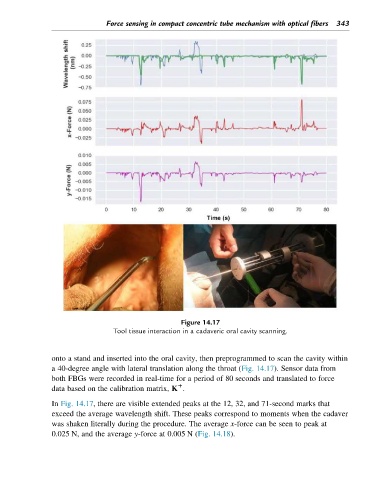
Figure 14.17
Tool tissue interaction in a cadaveric oral cavity scanning.
onto a stand and inserted into the oral cavity, then preprogrammed to scan the cavity within
a 40-degree angle with lateral translation along the throat (Fig. 14.17). Sensor data from
both FBGs were recorded in real-time for a period of 80 seconds and translated to force
1
data based on the calibration matrix, K .
In Fig. 14.17, there are visible extended peaks at the 12, 32, and 71-second marks that
exceed the average wavelength shift. These peaks correspond to moments when the cadaver
was shaken literally during the procedure. The average x-force can be seen to peak at
0.025 N, and the average y-force at 0.005 N (Fig. 14.18).