
Page 457 - Flexible Robotics in Medicine
P. 457
Flexible drill manipulator utilizing different rolling sliding joints for transoral drilling 451
hole, 2 1, provides space for the drilling wire to enter and exits from the bottom hole of
the segment, 2 5. Whereas, the four smaller identical holes, 2 2, positioned 90 degrees to
one another, are used for metal cable wires.
Fig. 19.S3 shows the proximal arced segment, 1 2, which composes of holes 3 1, for the
cable wires and 3 2 for the drilling wire. The protruded tip 3 3 fits into a “C” cut space
2 5, of the previous segment. Like the locking mechanism between male and female wire,
this provides perfect locking between the two connectors when the wires are tensioned.
This prevents any up and down movements due to the drilling vibrations, if any. On the
other end of the connector, “C” cut space, 3 4, is created to fit the top of the next segment.
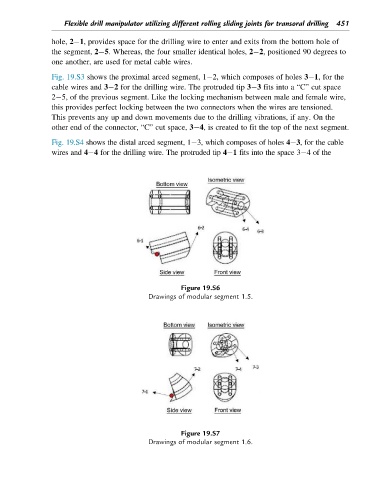
Fig. 19.S4 shows the distal arced segment, 1 3, which composes of holes 4 3, for the cable
wires and 4 4 for the drilling wire. The protruded tip 4 1 fits into the space 3 4ofthe
Figure 19.S6
Drawings of modular segment 1.5.
Figure 19.S7
Drawings of modular segment 1.6.