
Page 456 - Flexible Robotics in Medicine
P. 456
450 Chapter 19
Fig. 19.S1 shows the isometric view of our flexible drill manipulator in its curved rigid
structure, displaying the different modular segments in the device and a photograph of our
prototype’s shaft with all the segments assembled together. At the more proximal end, there
is a proximal connector segment 1 1, which connects the shaft to the ratchet control
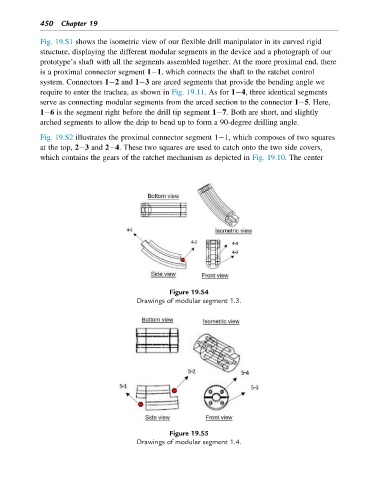
system. Connectors 1 2 and 1 3 are arced segments that provide the bending angle we
require to enter the trachea, as shown in Fig. 19.11. As for 1 4, three identical segments
serve as connecting modular segments from the arced section to the connector 1 5. Here,
1 6 is the segment right before the drill tip segment 1 7. Both are short, and slightly
arched segments to allow the drip to bend up to form a 90-degree drilling angle.
Fig. 19.S2 illustrates the proximal connector segment 1 1, which composes of two squares
at the top, 2 3 and 2 4. These two squares are used to catch onto the two side covers,
which contains the gears of the ratchet mechanism as depicted in Fig. 19.10. The center
Figure 19.S4
Drawings of modular segment 1.3.
Figure 19.S5
Drawings of modular segment 1.4.