
Page 451 - Flexible Robotics in Medicine
P. 451
Flexible drill manipulator utilizing different rolling sliding joints for transoral drilling 445
material onto a force sensor, as shown. These were secured using blue tack, and the sensor
zeroed to obtain an accurate measurement of forces acting on the PVC.
The force exerted by drilling through one PVC layer was measured by the OptoForce
sensor. By Newton’s third law, the force exerted by the tip of the drill on the bending
segment can then be estimated. This force is approximately 2.5 N, which is less than the
bending segment force limit of 13.175 N (Fig. 19.24).
Table 19.5: Experimental data of X and Y direction forces.
Frequency (Hz) Force (mN)
Test X Y X Y
1 9.19 8.98 102.37 244.16
2 15.73 15.73 164.86 269.76
3 15.78 15.78 33.33 116.8
4 15.62 15.55 348.06 65.16
5 15.38 15.46 451.9 115.25
Mean 14.34 14.30 220.10 162.45
Standard deviation 2.88 2.97 174.56 89.40
Notes: From the data, we can conclude that the mean frequency of about 14 Hz is a favorable reduction in vibration.
Additionally, the force experienced is negligible, approximately 0.2 and 0.16 N in each direction.
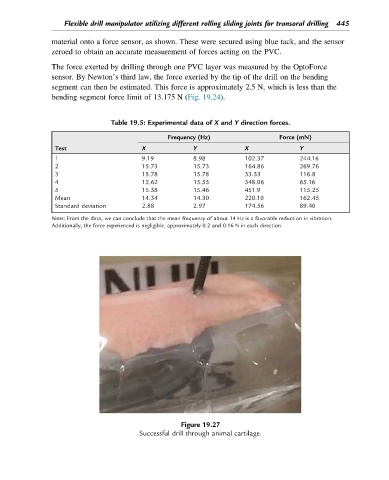
Figure 19.27
Successful drill through animal cartilage.