
Page 449 - Flexible Robotics in Medicine
P. 449
Flexible drill manipulator utilizing different rolling sliding joints for transoral drilling 443
Table 19.4: Maximum force sustained by Goldrill prototypes.
Maximum resultant vector Force (mN) Standard deviation (mN)
Goldrill GR3 (with handle) 13,175 2220.7
Goldrill GR2 3171 331.82
Goldrill GE3 1978 49.34
Goldrill GE2 1160 318.32
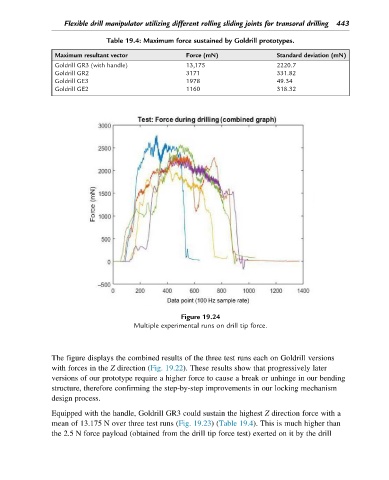
Figure 19.24
Multiple experimental runs on drill tip force.
The figure displays the combined results of the three test runs each on Goldrill versions
with forces in the Z direction (Fig. 19.22). These results show that progressively later
versions of our prototype require a higher force to cause a break or unhinge in our bending
structure, therefore confirming the step-by-step improvements in our locking mechanism
design process.
Equipped with the handle, Goldrill GR3 could sustain the highest Z direction force with a
mean of 13.175 N over three test runs (Fig. 19.23)(Table 19.4). This is much higher than
the 2.5 N force payload (obtained from the drill tip force test) exerted on it by the drill