
Page 231 - Fundamentals of Ocean Renewable Energy Generating Electricity From The Sea
P. 231
220 Fundamentals of Ocean Renewable Energy
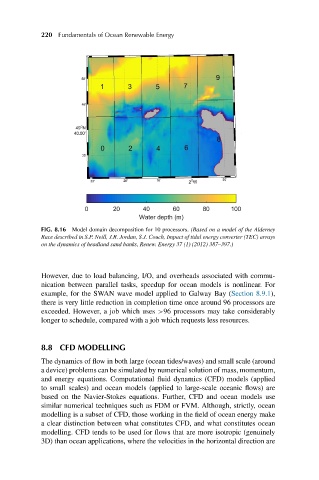
FIG. 8.16 Model domain decomposition for 10 processors. (Based on a model of the Alderney
Race described in S.P. Neill, J.R. Jordan, S.J. Couch, Impact of tidal energy converter (TEC) arrays
on the dynamics of headland sand banks, Renew. Energy 37 (1) (2012) 387–397.)
However, due to load balancing, I/O, and overheads associated with commu-
nication between parallel tasks, speedup for ocean models is nonlinear. For
example, for the SWAN wave model applied to Galway Bay (Section 8.9.1),
there is very little reduction in completion time once around 96 processors are
exceeded. However, a job which uses >96 processors may take considerably
longer to schedule, compared with a job which requests less resources.
8.8 CFD MODELLING
The dynamics of flow in both large (ocean tides/waves) and small scale (around
a device) problems can be simulated by numerical solution of mass, momentum,
and energy equations. Computational fluid dynamics (CFD) models (applied
to small scales) and ocean models (applied to large-scale oceanic flows) are
based on the Navier-Stokes equations. Further, CFD and ocean models use
similar numerical techniques such as FDM or FVM. Although, strictly, ocean
modelling is a subset of CFD, those working in the field of ocean energy make
a clear distinction between what constitutes CFD, and what constitutes ocean
modelling. CFD tends to be used for flows that are more isotropic (genuinely
3D) than ocean applications, where the velocities in the horizontal direction are