
Page 129 - Hacking Roomba
P. 129
110 Part I — Interfacing
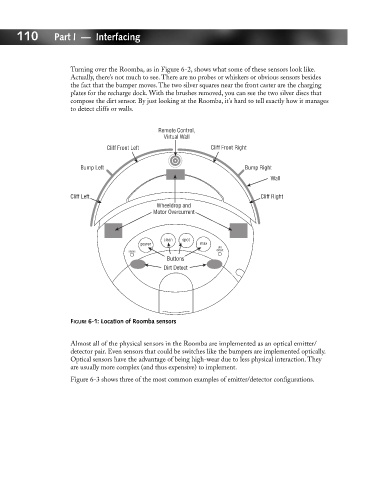
Turning over the Roomba, as in Figure 6-2, shows what some of these sensors look like.
Actually, there’s not much to see. There are no probes or whiskers or obvious sensors besides
the fact that the bumper moves. The two silver squares near the front caster are the charging
plates for the recharge dock. With the brushes removed, you can see the two silver discs that
compose the dirt sensor. By just looking at the Roomba, it’s hard to tell exactly how it manages
to detect cliffs or walls.
Remote Control,
Virtual Wall
Cliff Front Left Cliff Front Right
Bump Left Bump Right
Wall
Cliff Left Cliff Right
Wheeldrop and
Motor Overcurrent
clean spot
power max
dirt
status detect
Buttons
Dirt Detect
FIGURE 6-1: Location of Roomba sensors
Almost all of the physical sensors in the Roomba are implemented as an optical emitter/
detector pair. Even sensors that could be switches like the bumpers are implemented optically.
Optical sensors have the advantage of being high-wear due to less physical interaction. They
are usually more complex (and thus expensive) to implement.
Figure 6-3 shows three of the most common examples of emitter/detector configurations.