
Page 282 - Handbook of Biomechatronics
P. 282
Prediction – before the stride
EMG EMG (mV)
sensors
Vertical load (N)
Mechanical
sensors Knee angle (°)
Ankle angle (°)
Heel contact Heel contact
EMG Model describing
feature extraction suitable EMG
Predicted
Mechanical sensor Forward
(A) locomotion
feature extraction predictor
mode
Adaptation – after the stride
EMG EMG (mV)
sensors
Vertical load (N)
Mechanical
sensors Knee angle (°)
Ankle angle (°)
Heel contact Heel contact
EMG / mechanical
sensor features Mechanical sensor Backwards Mode
used for feature extraction estimator label
prediction
Adaptation of
forward predictor and
(B) suitable EMG model
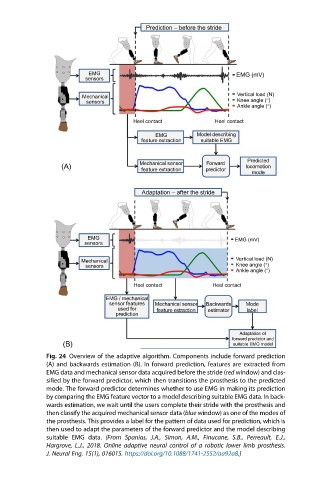
Fig. 24 Overview of the adaptive algorithm. Components include forward prediction
(A) and backwards estimation (B). In forward prediction, features are extracted from
EMG data and mechanical sensor data acquired before the stride (red window) and clas-
sified by the forward predictor, which then transitions the prosthesis to the predicted
mode. The forward predictor determines whether to use EMG in making its prediction
by comparing the EMG feature vector to a model describing suitable EMG data. In back-
wards estimation, we wait until the users complete their stride with the prosthesis and
then classify the acquired mechanical sensor data (blue window) as one of the modes of
the prosthesis. This provides a label for the pattern of data used for prediction, which is
then used to adapt the parameters of the forward predictor and the model describing
suitable EMG data. (From Spanias, J.A., Simon, A.M., Finucane, S.B., Perreault, E.J.,
Hargrove, L.J., 2018. Online adaptive neural control of a robotic lower limb prosthesis.
J. Neural Eng. 15(1), 016015. https://doi.org/10.1088/1741-2552/aa92a8.)