
Page 278 - Handbook of Biomechatronics
P. 278
272 Georgios A. Bertos and Evangelos G. Papadopoulos
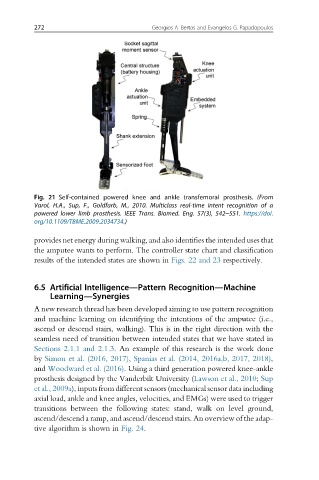
Fig. 21 Self-contained powered knee and ankle transfemoral prosthesis. (From
Varol, H.A., Sup, F., Goldfarb, M., 2010. Multiclass real-time intent recognition of a
powered lower limb prosthesis. IEEE Trans. Biomed. Eng. 57(3), 542–551. https://doi.
org/10.1109/TBME.2009.2034734.)
provides net energy during walking, and also identifies the intended uses that
the amputee wants to perform. The controller state chart and classification
results of the intended states are shown in Figs. 22 and 23 respectively.
6.5 Artificial Intelligence—Pattern Recognition—Machine
Learning—Synergies
A new research thread has been developed aiming to use pattern recognition
and machine learning on identifying the intentions of the amputee (i.e.,
ascend or descend stairs, walking). This is in the right direction with the
seamless need of transition between intended states that we have stated in
Sections 2.1.1 and 2.1.3. An example of this research is the work done
by Simon et al. (2016, 2017), Spanias et al. (2014, 2016a,b, 2017, 2018),
and Woodward et al. (2016). Using a third generation powered knee-ankle
prosthesis designed by the Vanderbilt University (Lawson et al., 2010; Sup
et al., 2009a), inputs from different sensors (mechanical sensor data including
axial load, ankle and knee angles, velocities, and EMGs) were used to trigger
transitions between the following states: stand, walk on level ground,
ascend/descend a ramp, and ascend/descend stairs. An overview of the adap-
tive algorithm is shown in Fig. 24.