
Page 330 - Handbook of Biomechatronics
P. 330
Upper Extremity Rehabilitation Robots: A Survey 323
Manipulanda are end-effector-based robots that have a simple structure
and control algorithms. Thus, it is hard to perform special movements of a
distinct joint using these robots. Another design issue in these robots is that
the end-effector at most can provide 6 degree-of-freedom (DOF). Hence,
the number of anatomical movements should not exceed 6; otherwise, it will
cause redundancy, which may be unsafe.
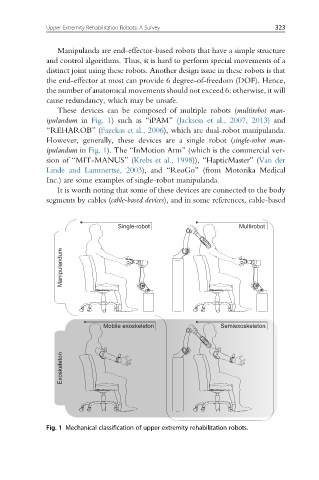
These devices can be composed of multiple robots (multirobot man-
ipulandum in Fig. 1) such as “iPAM” (Jackson et al., 2007, 2013) and
“REHAROB” (Fazekas et al., 2006), which are dual-robot manipulanda.
However, generally, these devices are a single robot (single-robot man-
ipulandum in Fig. 1). The “InMotion Arm” (which is the commercial ver-
sion of “MIT-MANUS” (Krebs et al., 1998)), “HapticMaster” (Van der
Linde and Lammertse, 2003), and “ReoGo” (from Motorika Medical
Inc.) are some examples of single-robot manipulanda.
It is worth noting that some of these devices are connected to the body
segments by cables (cable-based devices), and in some references, cable-based
Single-robot Multirobot
Manipulandum
Mobile exoskeleton Semiexoskeleton
Exoskeleton
Fig. 1 Mechanical classification of upper extremity rehabilitation robots.