
Page 335 - Handbook of Biomechatronics
P. 335
328 Borna Ghannadi et al.
High-level Low-level
control control
scenarios scenarios
Kinematic-based
position control
Passive trajectory Record-and-replay
tracking control
Teach-and-replay
Passive Passive mirroring
control
Gaze-based
Passive stretching
tracking
EMG-based control
Assistive control Triggered passive
FES-based control
BCI/EEG-based
control
Impedance-based
Partially assistive
assistance
Resistance Attractive force field
induced control
Resistive control Error amplification Model-based control
Constraint Learning-based
Tunneling
induced control
Counterbalance-
Corrective control Synergy-based
based control
Performance-based
Haptic provoke
control
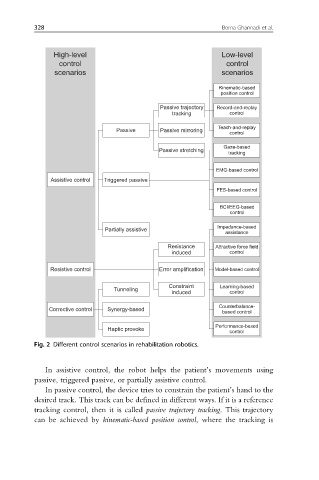
Fig. 2 Different control scenarios in rehabilitation robotics.
In assistive control, the robot helps the patient’s movements using
passive, triggered passive, or partially assistive control.
In passive control, the device tries to constrain the patient’s hand to the
desired track. This track can be defined in different ways. If it is a reference
tracking control, then it is called passive trajectory tracking. This trajectory
can be achieved by kinematic-based position control, where the tracking is