
Page 338 - Handbook of Biomechatronics
P. 338
Upper Extremity Rehabilitation Robots: A Survey 331
Performance Ideal control
Admittance control
Impedance control
Environment stiffness
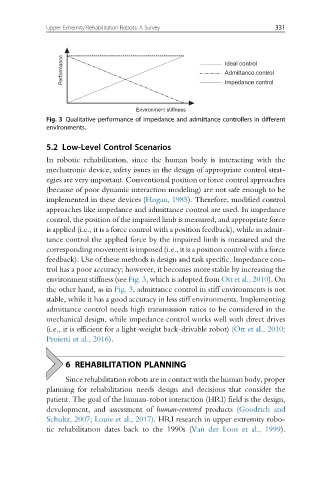
Fig. 3 Qualitative performance of impedance and admittance controllers in different
environments.
5.2 Low-Level Control Scenarios
In robotic rehabilitation, since the human body is interacting with the
mechatronic device, safety issues in the design of appropriate control strat-
egies are very important. Conventional position or force control approaches
(because of poor dynamic interaction modeling) are not safe enough to be
implemented in these devices (Hogan, 1985). Therefore, modified control
approaches like impedance and admittance control are used. In impedance
control, the position of the impaired limb is measured, and appropriate force
is applied (i.e., it is a force control with a position feedback), while in admit-
tance control the applied force by the impaired limb is measured and the
corresponding movement is imposed (i.e., it is a position control with a force
feedback). Use of these methods is design and task specific. Impedance con-
trol has a poor accuracy; however, it becomes more stable by increasing the
environment stiffness (see Fig. 3, which is adopted from Ott et al., 2010). On
the other hand, as in Fig. 3, admittance control in stiff environments is not
stable, while it has a good accuracy in less stiff environments. Implementing
admittance control needs high transmission ratios to be considered in the
mechanical design, while impedance control works well with direct drives
(i.e., it is efficient for a light-weight back-drivable robot) (Ott et al., 2010;
Proietti et al., 2016).
6 REHABILITATION PLANNING
Since rehabilitation robots are in contact with the human body, proper
planning for rehabilitation needs design and decisions that consider the
patient. The goal of the human-robot interaction (HRI) field is the design,
development, and assessment of human-centered products (Goodrich and
Schultz, 2007; Louie et al., 2017). HRI research in upper extremity robo-
tic rehabilitation dates back to the 1990s (Van der Loos et al., 1999).