
Page 39 - Handbook of Biomechatronics
P. 39
Actuator Technologies 33
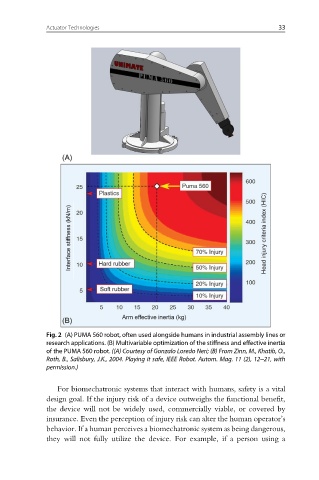
Fig. 2 (A) PUMA 560 robot, often used alongside humans in industrial assembly lines or
research applications. (B) Multivariable optimization of the stiffness and effective inertia
of the PUMA 560 robot. ((A) Courtesy of Gonzalo Loredo Neri; (B) From Zinn, M., Khatib, O.,
Roth, B., Salisbury, J.K., 2004. Playing it safe, IEEE Robot. Autom. Mag. 11 (2), 12–21, with
permission.)
For biomechatronic systems that interact with humans, safety is a vital
design goal. If the injury risk of a device outweighs the functional benefit,
the device will not be widely used, commercially viable, or covered by
insurance. Even the perception of injury risk can alter the human operator’s
behavior. If a human perceives a biomechatronic system as being dangerous,
they will not fully utilize the device. For example, if a person using a