
Page 114 - Human Inspired Dexterity in Robotic Manipulation
P. 114
112 Human Inspired Dexterity in Robotic Manipulation
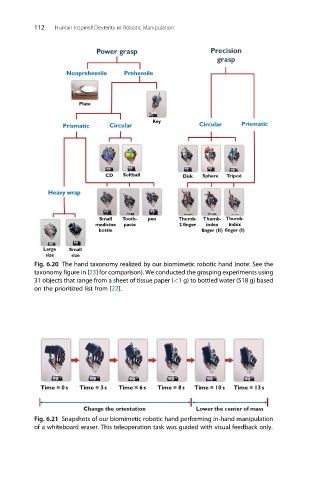
Fig. 6.20 The hand taxonomy realized by our biomimetic robotic hand (note: See the
taxonomy figure in [23] for comparison). We conducted the grasping experiments using
31 objects that range from a sheet of tissue paper (<1 g) to bottled water (518 g) based
on the prioritized list from [22].
Fig. 6.21 Snapshots of our biomimetic robotic hand performing in-hand manipulation
of a whiteboard eraser. This teleoperation task was guided with visual feedback only.