
Page 199 - Human Inspired Dexterity in Robotic Manipulation
P. 199
(A)
(B) (C)
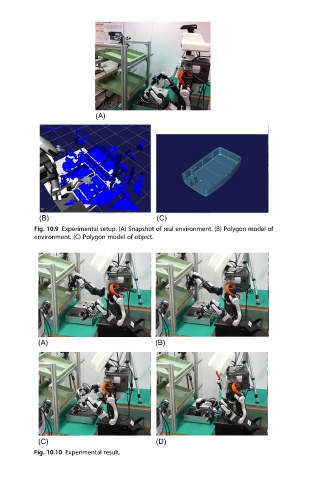
Fig. 10.9 Experimental setup. (A) Snapshot of real environment. (B) Polygon model of
environment. (C) Polygon model of object.
(A) (B)
(C) (D)
Fig. 10.10 Experimental result.