
Page 200 - Human Inspired Dexterity in Robotic Manipulation
P. 200
Planning Dexterous Dual-Arm Manipulation 199
(A) (B)
(C) (D)
(E) (F)
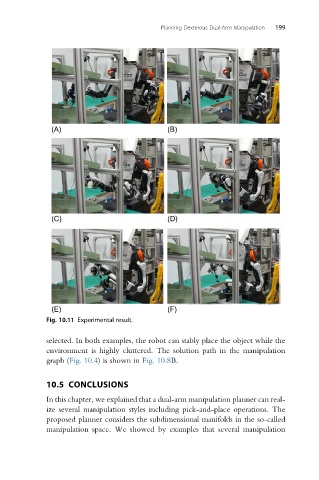
Fig. 10.11 Experimental result.
selected. In both examples, the robot can stably place the object while the
environment is highly cluttered. The solution path in the manipulation
graph (Fig. 10.4) is shown in Fig. 10.8B.
10.5 CONCLUSIONS
In this chapter, we explained that a dual-arm manipulation planner can real-
ize several manipulation styles including pick-and-place operations. The
proposed planner considers the subdimensional manifolds in the so-called
manipulation space. We showed by examples that several manipulation