
Page 94 - Human Inspired Dexterity in Robotic Manipulation
P. 94
92 Human Inspired Dexterity in Robotic Manipulation
In the following sections, we are going to identify the important biome-
chanical features that shape the function of a human hand from the following
aspects: the bones, flexor and extensor tendons, tendon sheath, biological
joints, and joint ligaments.
6.3.1 Bones and Joints
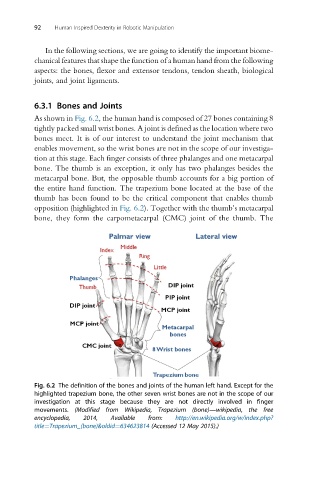
As shown in Fig. 6.2, the human hand is composed of 27 bones containing 8
tightly packed small wrist bones. A joint is defined as the location where two
bones meet. It is of our interest to understand the joint mechanism that
enables movement, so the wrist bones are not in the scope of our investiga-
tion at this stage. Each finger consists of three phalanges and one metacarpal
bone. The thumb is an exception, it only has two phalanges besides the
metacarpal bone. But, the opposable thumb accounts for a big portion of
the entire hand function. The trapezium bone located at the base of the
thumb has been found to be the critical component that enables thumb
opposition (highlighted in Fig. 6.2). Together with the thumb’s metacarpal
bone, they form the carpometacarpal (CMC) joint of the thumb. The
Fig. 6.2 The definition of the bones and joints of the human left hand. Except for the
highlighted trapezium bone, the other seven wrist bones are not in the scope of our
investigation at this stage because they are not directly involved in finger
movements. (Modified from Wikipedia, Trapezium (bone)—wikipedia, the free
encyclopedia, 2014, Available from: http://en.wikipedia.org/w/index.php?
title¼Trapezium_(bone)&oldid¼634623814 (Accessed 12 May 2015).)